Traffic lights are currently an annoying but inevitable part of traffic. With the introduction of self-driving cars however, can we avoid having to wait for a red light ever again?
Traffic lights are currently an inevitable part of traffic, as traffic lights are needed to govern busy traffic in a safe and orderly fashion. Because cities and highways are becoming more congested year after year, traffic lights are needed more than ever. However, everyone has experienced that traffic lights cause frustration. “Why did it turn red just before I got to cross the intersection?” (No, the steering wheel cannot do anything about it, even not if you hit it with your fists…) And traffic lights are never quick enough to change the light on your lane to green (the scolding does not help…). Reducing frustration caused by traffic lights is not easy, but there is hope on the horizon: traffic lights will not be needed anymore with the introduction of self-driving vehicles!
As the first self-driving vehicles are already on the road in the US, it is important to think about what can be done when self-driving vehicles are occupying the road. So, let’s have a look at how traffic lights will become obsolete once self-driving cars are around – and what will replace them.
Traffic in the past: what was done and what can we learn?
In order to get a feeling for some good strategies, we first take a look back in time.
Until the end of the 19th century, no traffic lights were implemented at all. How did they deal with traffic then? In general, there were some rules to which you had to abide, but besides those, everyone could do whatever they liked, which sometimes led to chaos. This is not something we should want to go back to: typically it would even increase the number of traffic jams, as is the case when traffic lights are down nowadays (even though the traffic lights might vanish with the introduction of self-driving cars, we do not go back to this chaos; the future is much brighter).
At some busy intersections, traffic police officers were controlling the traffic, for example in London in the 18th century. Their task was to organize the traffic in an orderly fashion. They had to enforce that the traffic “kept left” for example. (This might very well have been a reason why traffic in Britain drives on the left side of the road, as before this was not necessarily the case.) Later on, more tasks were added, such as deciding when each vehicle should cross the intersection and traffic controllers were employed more often.
Since the introduction of traffic lights at the end of the 19th century, traffic lights have replaced the common traffic controller at many places. Traffic lights are nowadays able to deal with traffic quite efficiently. In some sense, they do the same job as traffic controllers do: they decide when each vehicle is allowed to cross the intersection. Using for example detectors in the road, they can estimate how many vehicles are waiting to cross the intersection. To some extent, they can use this information to adapt their scheduling (by extending or shortening the green period for certain lanes).
Typically, the presence of traffic lights is preferred to the presence of traffic controllers. Traffic controllers are daily scolded at and sometimes are even hit by (frustrated?) car drivers. Everyone knows how disappointing it can be that such a controller decides that you are the first to stop, while your predecessor could still continue.
Reducing congestion taking advantage of self-driving vehicles
In the future, we nevertheless propose to get rid of the traditional traffic light and to replace them by some kind of virtual traffic controller, which resembles the current-day traffic controller more than traffic lights. In order to reduce the congestion at intersections when self-driving cars are around, we will take a closer look at the advantages a traffic controller has above the common traffic light (really, there are advantages of such controllers, even though not everyone agrees, considering the scolding mentioned in the previous paragraph).
For example, traffic controllers can count the exact number of cars waiting at each leg of the intersection and use this knowledge to improve the traffic flow. Traffic lights might use detectors in the road, but the counts from such detectors are not nearly as accurate as those of traffic controllers. So, traffic controllers can anticipate better on the actual situation than traffic lights.
Also, the controller can look down the road to see whether or not vehicles are approaching the intersection along that road. This information can also be taken into account by the traffic controller to decide when each vehicle is allowed to cross the intersection. The traffic light cannot do this in the same way as the traffic controller.
Moreover, a traffic light is programmed to follow certain rules from which it cannot deviate. If needed, a traffic controller can. Sometimes it might be very busy on one road and quiet on the other roads. Then, a traffic controller can decide to give way to the busy road for a long period of time, possibly longer than the traffic light can (because the traffic light most likely has a fixed maximum length for a green period for each road). As an example of something that should not happen: imagine that you are waiting for a red traffic light, while there is no one else occupying the intersection or driving towards it. Traffic controllers will always avoid such situations, whereas traffic lights cannot always anticipate that well on such situations.
Then why are there no traffic controllers at every intersection? But of course, replacing the 5600 (!) traffic lights in the Netherlands (in 2015) with traffic controllers is impossible. There are not enough traffic controllers – and if there were, there would not be enough money to pay all of them.
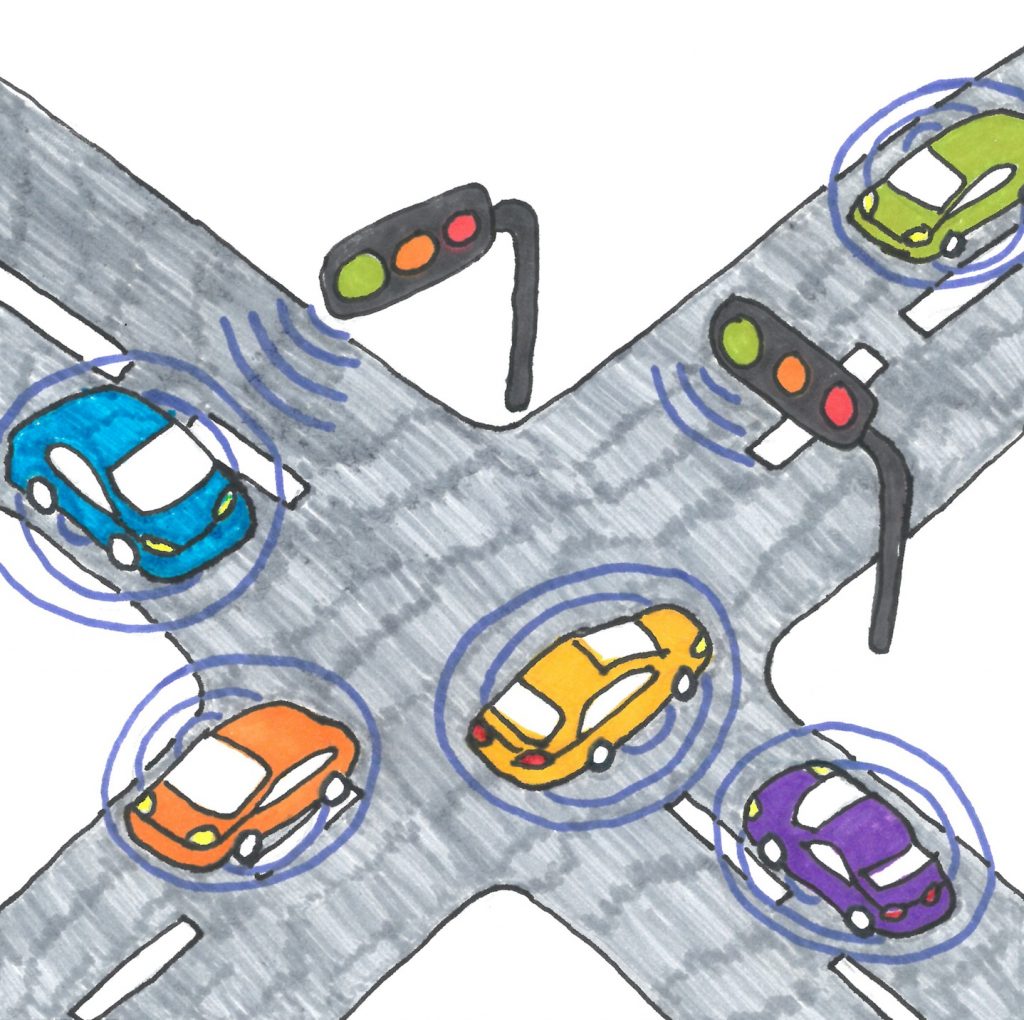
What we would like, is a solution with the advantages of the traffic controller, but without the costs. This is difficult nowadays, but becomes easier if there are self-driving vehicles. Self-driving vehicles are able to communicate with each other and with road-side equipment, which you could see as the virtual traffic controller we mentioned earlier.
Such a virtual traffic controller can keep an overview of all vehicles driving towards the intersection, by means of communication with those vehicles. This is exactly the same overview as a traffic controller has. For example, anticipation on vehicles driving down the road is then possible. The virtual traffic controller communicates with the vehicles and tells them when each vehicle is allowed to cross the intersection.
Currently, part of the frustration caused by traffic lights and traffic controllers is that it seems that it forces you to stop just before you would be allowed to cross the intersection way too often. The frustration you feel in such cases is just. Increasing the number of cars crossing during a single green period is (almost) always good. This namely decreases the number of switches between various legs of the intersection. This is efficient?, as during those switches no vehicles are crossing the intersection, increasing the delay of vehicles that still have to cross the intersection. So minimizing the number of switches between legs is a good thing to do. The virtual traffic controller can be programmed in such a way that the number of switches is minimized.
To some extent, this idea is already being put into practice. In Helmond (the Netherlands), several intelligent traffic lights are installed, which can communicate with “usual” cars with some additional equipment, so-called connected vehicles. Also here, anticipation on the actual traffic is the key to reduce congestion. According to simulations for the Helmond example, congestion can be reduced by more than 20%! For the setting with self-driving vehicles which we are looking at, an even higher reduction of the congestion than this 20% can be obtained, based on simulation results!
And reduce pollution!
In the Helmond example, the connected vehicles also receive a speed advise, based on the current traffic situation. The virtual traffic controller knows when the vehicle is allowed to cross the intersection and communicates this to the vehicle, resulting in a speed advice. If you follow this advice, you are at the right time at the intersection and, ideally, do not have to stop.
This idea reduces pollution, as less deceleration and acceleration is needed! This is good, as in some cities you cannot put your hand at the window frame with your hand getting black because of soot caused by emissions of cars. And in other cities the exhaust gases cause such a lot of smog that you can barely see anything, day after day.
For cyclists this idea of giving a speed advice is already used. For example in Amsterdam, you will hit a green light for a series of traffic lights (a so-called green wave) at some places if you drive between 15 and 18 km/h!
Can a speed advice for self-driving cars be given as it happens now for some cars and cyclists? Yes, self-driving cars can do so when they know when to cross the intersection! In some sense it actually becomes even easier. In Helmond, the driver decides to follow the advice or not. Self-driving vehicles can be programmed in such a way that they will always follow the advice (you as a driver of such a vehicle cannot decide against it).
The vehicle itself can put the advice together, as the vehicle knows it current speed, when it should cross the intersection and how far it still is from the intersection. The vehicle can thus determine the mean speed at which it has to drive. If the vehicle minimizes the amount of acceleration, the vehicle is close to minimizing the amount of energy needed for crossing the intersection. In this way, the vehicle can be sure that it is both at the right time at the intersection (so the virtual traffic controller is happy) and that pollution is minimized! This reduces the impact of vehicles on the quality of life in e.g. cities.
A brighter future
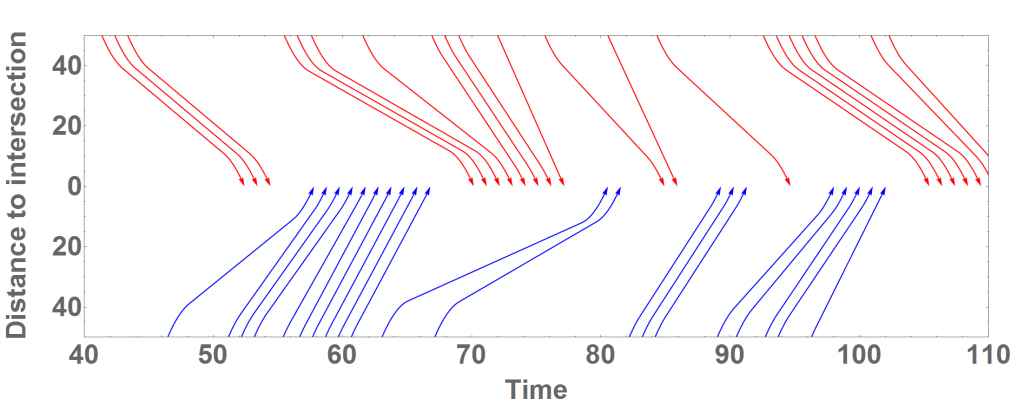
Let’s see in the figure below how this would work. We see two streams of vehicles (represented by the red and blue arrows) driving towards an intersection. The intersection is at the middle of the figure. The arrows represent individual vehicles. We see that there are no collisions, as none of the arrows cross each other, which is a good thing to start with! Moreover, vehicles are grouped together, as there are many arrows of the same color (and therefore originating from the same direction) close to each other. Combining vehicles driving in the same direction in groups reduces the number of switches – which is a good thing as discussed before. The steepness of an arrow corresponds to how quickly a vehicles drives, so we can see the deceleration and acceleration that each vehicle performs. For example, the first red vehicle on the left, starts decelerating when it is fifty meters away from the intersection, then cruises at a constant speed for some time and then accelerates at a ten meters distance from the intersection. We see that none of the vehicles has to stop, which is good if we want to reduce pollution!
Employing the ideas described above, the congestion at intersections might be decreased considerably. Moreover, the pollution will be way less than it is nowadays. The traffic lights that were invented in the 19th century to replace traffic controllers are not needed anymore if we introduce the virtual traffic controller and when self-driving vehicles are occupying the roads. Then, we will go back to a situation where a traffic controller organizes the traffic as happened (to some extent) in the 18th century in London. After all, even though traffic controllers cause quite some frustration from time to time, they can actually do quite well, certainly when self-driving vehicles are driving around. Better than traffic lights currently can do.
Our current traffic management systems are designed for human-driven vehicles, which begs the question: can traffic management systems be made more efficient when dealing with autonomous vehicles?
Rapid urbanization without consideration for the environment is currently threatening urban dwellers. Its effects are exacerbating climate change and the urgency to adapt to our circumstances is growing. Network science may just have the key to solving our multifaceted problems.
Think of a local car dealer selling cars in your region. To make sure new cars are delivered on time a whole mechanism involving various people, factories, and transport companies, must operate in coordination. This is a highly complex process where mathematics plays an important role.
One of the main building blocks of modern AI-tools are artificial neural networks, abstract models inspired by the structure and functions of biological neural networks which enable machines to "learn". In this article, I will discuss some thoughts on this topic.
Rafael Prieto-Curiel is a mathematician and a faculty member at the Complexity Science Hub in Vienna, Austria. His research focuses on crime, mobility, migration and urban dynamics. We interviewed Rafael to learn about his story.